Eclipse
权限
低代码
ICU
swift
全文检索
webrtc
开发工具
在线聊天系统
16QAM
tensorflow
.Net6
性能
VG
考研数学
快捷键
ue5
中级
汽车电子
刘强东
飞控
2024/4/20 2:09:21
使用VScode编译betaflight固件--基于windows平台
使用VScode编译betaflight固件--基于windows平台 1、使用git克隆betaflight的开源代码2、betaflight的代码框架分析:3、配置编译环境:4、VScode上编译 betaflight不仅可以在LInux上进行编译也可以在Windows上编译,本文主要介绍在windows平台上…
Ubuntu18.04搭配无人机仿真环境(ROS,PX4,gazebo,Mavros,QGC安装教程)
Ubuntu18.04搭配无人机仿真环境 ROS环境配置版本安装 gazebo安装Mavrosa安装PX4源码下载和编译运行仿真地面站安装 ROS环境配置
我个人使用了代理环境进行下载。Linux没有代理的可以使用国内源。
清华大学源 sudo sh -c ‘. /etc/lsb-release && echo “deb http://m…

民用飞机飞控系统传感器故障诊断研究综述
导语
飞控系统中的各类传感器对飞机稳定与操纵起着至关重要的影响,是飞机的重要安全机载设备之一。传统冗余方法具有“安全性高,经济性低”的特点,通过多余度设计来提升系统的安全性给飞机的重量与结构设计、系统综合集成、维修与检测成本都…

发布一款将APM日志转换为Excel的开源工具
这几年有不少朋友向我咨询如何将APM日志转换为Excel,我之前的答复是先将日志转换为MATLAB的格式,然后用MATLAB导出为Excel。但是实际上不是每个人都会用MATLAB,并且处理数据也不是非要用MATLAB,更不是说用MATLAB了就显得专业、显得…
基于 parallels ubuntu 20.04 LTS (focal) 的ros+px4+gazebo 安装
系统环境:
主机环境macos 14.2.1 (23C71)、M1芯片Paralles商业版 19.1.0 (54729)ubuntuubuntu 20.04 LTS (focal)PX4v1.14.0ROS2foxy
虚拟机安装
1. 下载安装 parallels,参考评论;
2. 下载 ubuntu 镜像,使用 ubuntu 20.04 LT…
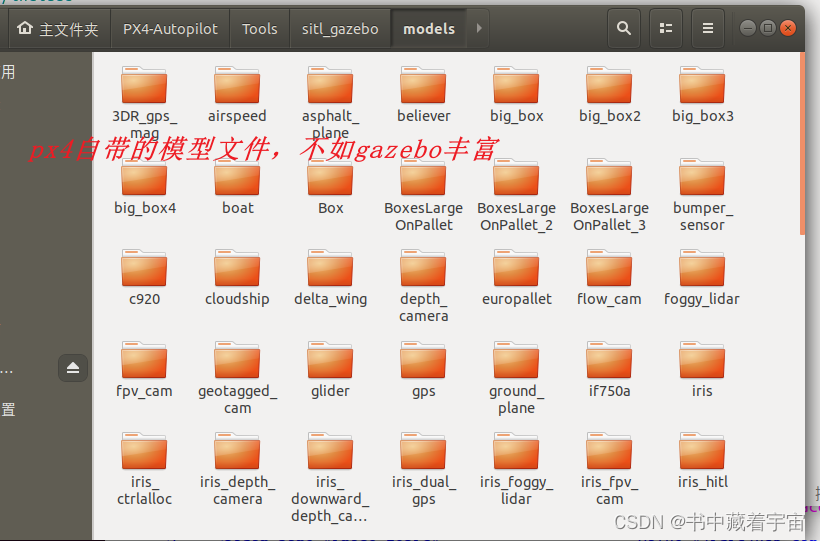
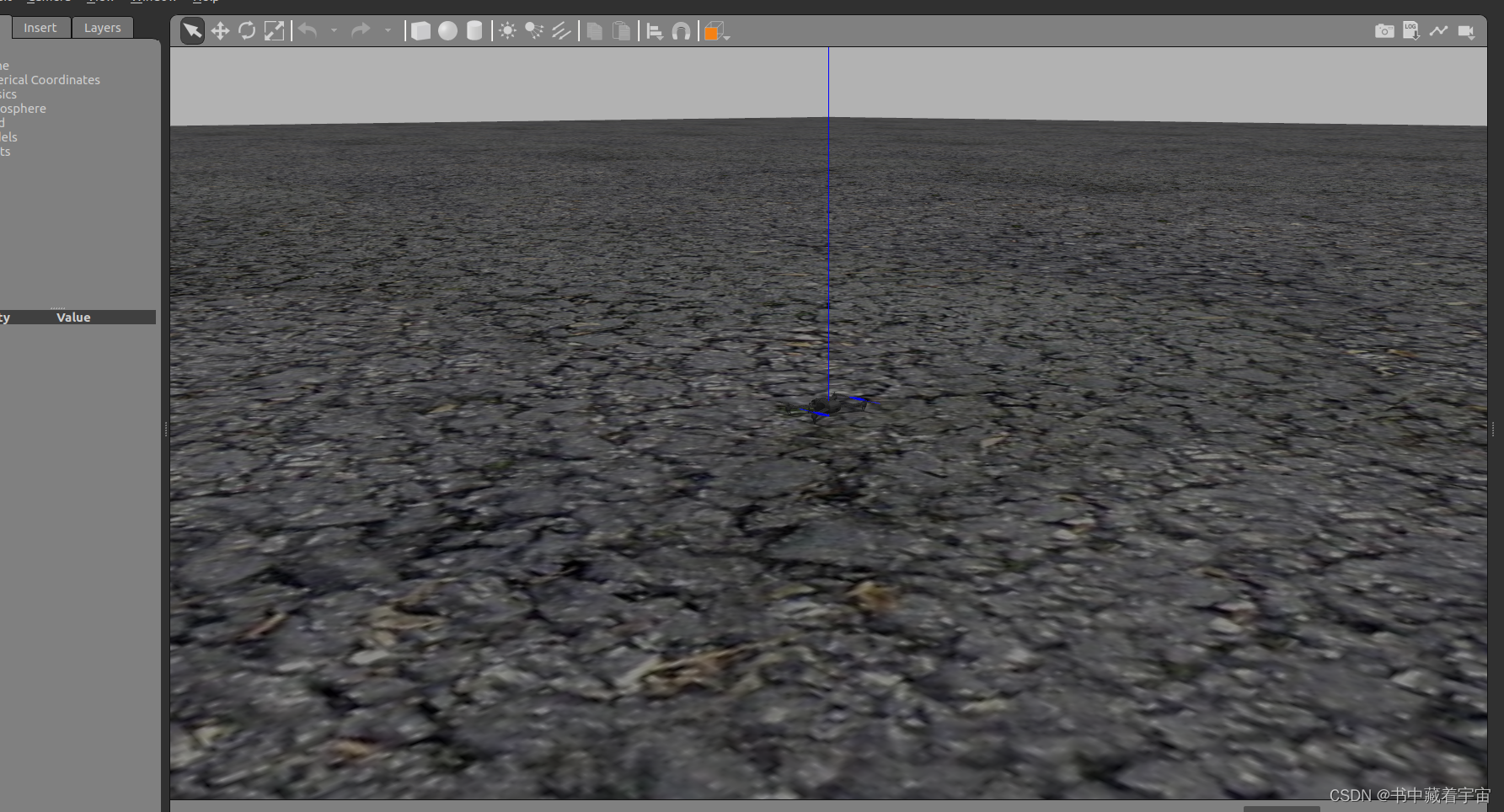
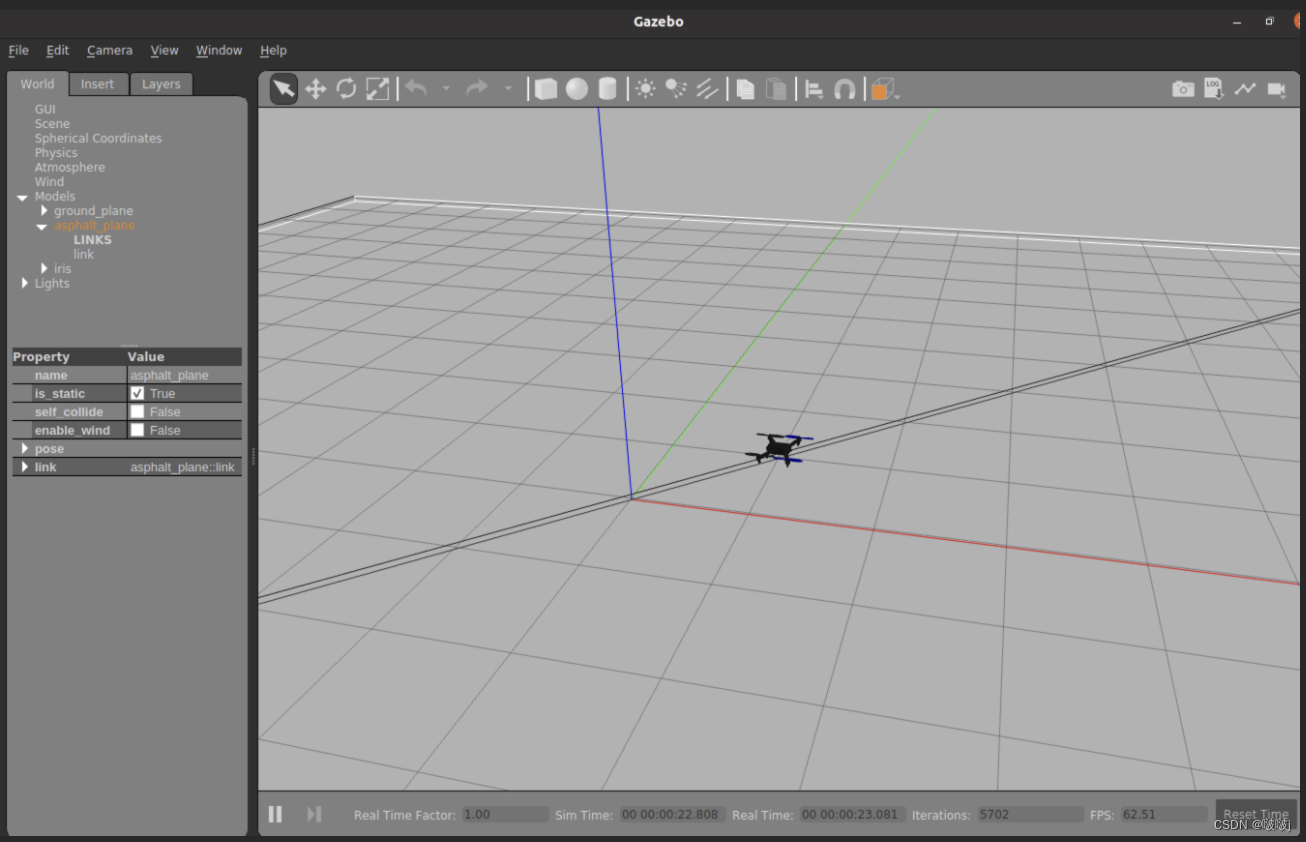
PX4仿真添加world模型文件,并使用yolov8进行跟踪
前言
目的:我们是为了在无人机仿真中使用一个汽车模型,然后让仿真的无人机能够识别到这个汽车模型。所以我们需要在无人机仿真的环境中添加汽车模型。
无人机仿真中我们默认使用的empty.world文件,所以只需要将我们需要的模型添加到一起写进这个empty.world文件中去就可以…
使用VScode编译betaflight固件--基于ubuntu平台
使用VScode编译betaflight固件--基于ubuntu平台 1、使用git克隆betaflight的开源代码2、配置编译环境3、使用VScode编译代码 window平台的见上一篇文章 使用VScode编译betaflight固件–基于windows平台 本文主要介绍在linux系统 ubuntu平台下使用VScode编译betaflight固件的方法…
PX4加速度计传感器校准原理
理想情况下,传感器的读数与实际物理量相同,但由于一些随机因素的影响,传感器测量到的数据与实际数据存在偏差,且偏差不停变化。偏差大体分为两种,零位偏差和标度偏差。对于一个传感器来说,实际物理量K*传感…

飞控姿态解算算法解析
姿态估计的作用?
姿态估计是飞控算法的一个基础部分,而且十分重要。为了完成飞行器平稳的姿态控制,首先需要精准的姿态数据作为控制器的反馈。
飞控姿态估计的难点?
姿态估计的一个难点主要是一般选用的惯性传感器,…
Ardupilot学习笔记
参考文献
【1】https://ardupilot.org
主打的就是一个炫酷 自驾仪 Ardupilot
一套开源的自驾仪,集成了各种各样的代码,包括其他开源代码(如PX4代码)和项目、驱动等。 即:自驾仪即集成了整个可以实现无人载具(如无人机ÿ…
PX4-Autopilot配置(gazebo)
推荐使用当前版本或stable及release版本;
要clone当前最新(debug)并且下载submodules:
git clone gitgithub.com:PX4/PX4-Autopilot.git --recursive更推荐的做法是,使用release的分支:
git clone --bra…
读取摇杆值_2019. 9.14
问题
这些天, 一直在查阅摇杆值处理的资料.
发现各种飞控对遥控器发来的数据(主要是摇杆值), 处理方式都不同.
参考了四份飞控代码, 主要有目前以下方式: 转换成百分比值. 转换成范围内数值 转换成范围内比例数值
两周了, 还未找到准确思路来处理!!! 计划
别烦这么多, 不兼…
NAZA连接不上win10及win10下安装dji驱动问题
**更:**评论区和私信许多小伙伴询问驱动下载地址 NAZA软件:https://www.dji.com/cn/downloads/softwares/assistant-naza-m-lite 驱动包:https://www.dji.com/cn/downloads/softwares/other-dji-win ————————————————————…